



FAUV

FAUV
F-AUV是一款鱼雷型的水下自主航行器,适用于石油、天然气、国防和安全、海洋学和环境监测等领域执行各种任务。F-AUV 基本结构是由一对碳纤维圆筒组成,尾部集成推进器及浮力调解气囊。
F-AUV 根据多年的应用经验而设计,具有强大的负载能力、机动性、多航行模式及开放的控制系统。为满足不同客户的需求,可为客户量身定制。
你最喜欢的控制板(Arduino, Arm, x86)可以很容易地托管在一个有效载荷模块中,有或没有其他设备。
一个串行和一个网络链接可用来连接你的板子和载体中央处理器。一组预定义的数据库提供对所有载体传感器和执行器的访问,以及通信设备-表面WiFi链接和声学调制解调器(可选功能)。
通过这种方式,你的Uapp (水下APP)将获得F-AUV的总控制,你将在真实的水下环境中测试你开发的GNC算法,或者你在多个AUV之间的协调策略。
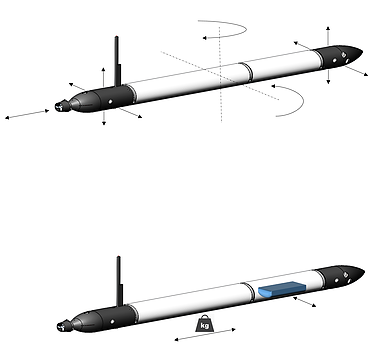
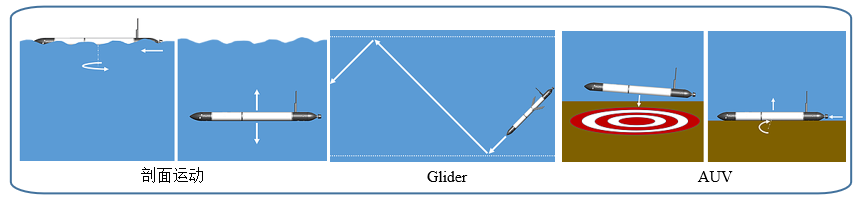
A-AUV的主要特点之一是它的高机动性,在没有任何移动控制表面的情况下可实现。在浪涌方向的运动是由一个双向的后推力产生的。在垂直和水平面上的运动,可以由两对额外的双向推力完成(交叉配置,头部和尾部)。传统的鱼雷形状的AUV只能在固定的速度下运动,由操作者设定速度或表面控制,转向时会受到水流的影响。而F-AUV可以在它的中心旋转,即使尾部推进器掉落也可以进行水平或垂直的转动。
浮力和姿态控制的综合运用进一步丰富了载体运动的灵活性,实际上使F-AUV成为一种混合运动航行器,具有标准的自行驱动的AUV功能、远程操作 (ROV)功能和低功耗的海洋滑翔机功能。
主要技术规格
直径 | 155mm |
长度 | 2180mm |
空气中重量 | 31kg |
水中重量 | -0.35/+0.35kg |
最大深度 | AUV模式:100m Glider模式:50m |
最大速度 | 2节(4节可选) |
最小速度 | 0节 |
续航 | AUV模式:14小时 Glider模式:数天 |
电池 | NiMh或Li-Ion |
导航传感器 | GPS、深度传感器、3D倾斜传感器 |
额外传感器 | 湿度、温度、电压 |
任务传感器 | 用户可选(负载模块) |
通讯 | 无线电 水声链路(可选) |