



水下机器人仿真开发
水下机器人仿真开发
AUV&ROV开发系统 - AUV Simulator是英国H-Scientific公司研发,专门用于AUV/UUV/ROV和小型潜艇的一套开发和仿真系统。它包含一个计算机软件包,使用不同工作模式对水下潜器进行6个自由度仿真。通过软件界面的平面视图和3D潜器视图,你可以非常直观地看到自己亲自设计的潜器对周边环境做出相应。非常细节的仿真参数都能有效地被保存,便于你接下来的分析和改进。通过控制界面你可以实时看到需求指标和机械参数设置,潜器相对于水流和对地速度,还能看到偏航、航向、风速和潮汐状况。
产品特性
Ÿ 真实的六自由度仿真,包括前进后退、
Ÿ 左右平移、横向翻滚、纵向倾斜以及偏移航向六大姿态参数的组合运动。
Ÿ 允许用户单独对前后倾斜、左右摇摆和上下颠簸的幅度进行测量。
Ÿ 用户可配置性,允许用户指定载体(潜器)组件的位置和性能。
Ÿ 可加入环境影响因素:包括潮汐和海况。涌浪响应模型:通过海平面的形状计算载体(潜器)运动,并计算其相对于海浪的速度。
Ÿ 自动控制算法总是最优地控制传动装置执行选定的任务,包括航迹跟踪和动态定位。
Ÿ 自动调整算法可优化载体特定控制器的性能。
Ÿ 串口通讯 – 传感器输出包括NMEA、TCM2、PD6语句。
Ÿ 模拟输入和输出。
Ÿ 数据记录和回放。
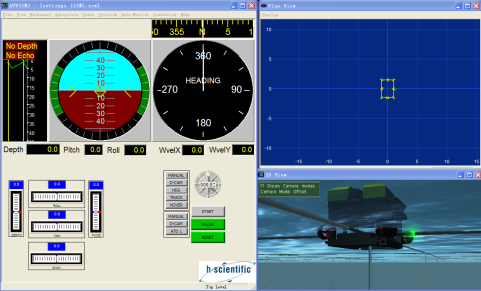
Ÿ AUV Simulator具有简单直观的用户界面和完全可配置的通讯设置,可自定义控制界面视图。
Ÿ 栅格视图(从上、东部、北部查看),3D视图(多种观察视角可供选择),海图视图。

主要功能:
视图界面 | 包含仪表显示控制界面、平面栅格视图、3D视图、海图视图 |
仪表显示及控 制按钮类型 | 包含刻度表盘、LED灯/数字显示器、仿真姿态仪、深度计、罗盘显示、水平/垂直控制滑块、控制台各功能控制按钮、仿真器开关按钮。 除罗盘、姿态仪以及深度计以外,其他按钮均可自由匹配功能连接。例如,数字显示器可配置来显示深度,也可配置显示对地速度。 |
控制级别 | 操作级、基本维护级、设计级、最高级。每个级别都可设置密码,防止未经允许更改系统设 置。 |
3D视角 | 有追踪模式、偏移模式、自由模式、范围模式、操作员模式供用户选择 |
平面栅格视图 | 用户可俯视、从东面、南面不同角度查看潜器视图 |
自动导航 | 自动航向、自动航迹跟踪、自动航速、悬停、自动定深/定高 |
通信 | 串口、NMEA2000端口 |
操作杆 | USB操作杆、GENIE操作杆 |
可搭载传感器 | GPS、罗经、测深仪、陀螺仪、DVL、惯导设备 |
六自由度仿真 | 前进后退、左右平移、上下运动、横向翻滚、纵向倾斜及偏移航向六大姿态参数的组合运动 |
仿真环境 | 潮汐、海况、温度 |
潜器模型 | 可配置机身部件及各种组件,如推进器、水平舵。机身可配置尺寸、重量、体积、重心、外观、各方向阻力系数,推进器可配置大小、转速、位置、角度、连接的机械通道 |
机械控制通道 | 建立机械控制通道、配置控制权分配模块(CAM)。CAM可匹配每个组件对潜器六自由度的影响 |